
Semantic Segmentation Based Lightweight Lane Detection Network (LW Net) for Intelligent Vehicles
Keywords:
Semantic Segmentation, Encoder-Decoder, Lane Detection, Light Weight.Abstract
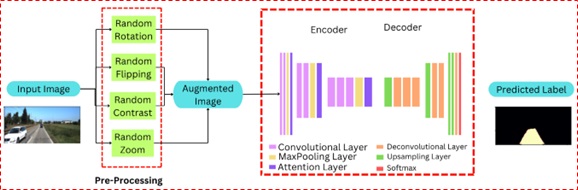
A novel lane detection system is proposed for intelligent vehicles. A key feature of this system is its lightweight design, which requires less computational power. Our lightweight network (LW Net) for semantic segmentation comprises convolutional and separable convolutional layers. We designed a total of six lightweight encoder models (LW Net-A, LW Net-B, LW Net-C, LW Net-D, LW Net-E, and LW Net-F), each paired with matching decoders. The first group of three models is based on depth D1, while the remaining models are based on depth D2. In these models, convolutional layers are either fully or partially replaced by separable convolutional layers. The lightweight network LW Net-A achieved an 88% reduction in training parameters, along with a 2.45% increase in test accuracy compared to the benchmark Seg Net model. Meanwhile, LW Net-F attained a 2% increase in test accuracy and a remarkable 94% reduction in training parameters compared to the benchmark Seg Net model. Overall, the proposed models are less computationally demanding than other benchmark networks, without compromising the pixel accuracy of the semantic model.
References
S. Ishikawa and H. Kuwamoto, “Visual Navigation of an Autonomous Vehicle Using White Line Recognition,” 1988.
M. Bertozzi, A. Broggi, M. Cellario, A. Fascioli, P. Lombardi, and M. Porta, “Artificial vision in road vehicles,” Proceedings of the IEEE, vol. 90, no. 7. Institute of Electrical and Electronics Engineers Inc., pp. 1258–1270, 2002. doi: 10.1109/JPROC.2002.801444.
J. Tang, S. Li, and P. Liu, “A review of lane detection methods based on deep learning,” Pattern Recognit, vol. 111, Mar. 2021, doi: 10.1016/j.patcog.2020.107623.
W. S. Wijesoma, K. R. S. Kodagoda, A. P. Balasuriya, and E. K. Teoh, “Road Edge and Lane Boundary Detection using Laser and Vision,” 2001.
J. Lu, M. Yang, H. Wang, and B. Zhang, “Vision-based Real-time Road Detection in Urban Traffic.” [Online]. Available: http://www.lits.tsinghua.edu.cn/lujianye/;
Q. Chen, “3-13 A Real-time Lane Detection Algorithm Based on a Hyperbola-Pair Model,” 2006.
H. Zhang, D. Hou, and Z. Zhou, “A Novel Lane Detection Algorithm Based on Support Vector Machine,” 2005.
S. G. Foda and A. K. Dawoud, “Highway Lane Boundary Determination For Autonomous Navigation.”
“Crisman_1991_UNSCARF--A color vision system for the detection of unstructured roads”.
J. D. Crisman and C. E. Thorpe, “CHRlSMAN AND THORPE: COLOR VISION SYSTEM THAT TRACKS ROADS AND INTERSECTIONS SCARF: A Color Vision System that Tracks Roads and Intersections.”
S. Beucher and M. Bilodeau, “Road Segmentation and Obstacle Detection by a fast watershed algorithm,” 1994. [Online]. Available: https://www.researchgate.net/publication/240221983
B. F. Wu, C. T. Lin, and Y. L. Chen, “Dynamic calibration and occlusion handling algorithms for lane tracking,” IEEE Transactions on Industrial Electronics, vol. 56, no. 5, pp. 1757–1773, 2009, doi: 10.1109/TIE.2008.2011295.
J. Long, E. Shelhamer, and T. Darrell, “Fully Convolutional Networks for Semantic Segmentation,” 2015.
K. He, X. Zhang, S. Ren, and J. Sun, “Deep Residual Learning for Image Recognition,” Dec. 2015, [Online]. Available: http://arxiv.org/abs/1512.03385
K. Simonyan and A. Zisserman, “Very Deep Convolutional Networks for Large-Scale Image Recognition,” Sep. 2014, [Online]. Available: http://arxiv.org/abs/1409.1556
O. Ronneberger, P. Fischer, and T. Brox, “U-Net: Convolutional Networks for Biomedical Image Segmentation,” May 2015, [Online]. Available: http://arxiv.org/abs/1505.04597
V. Badrinarayanan, A. Kendall, and R. Cipolla, “SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation,” IEEE Trans Pattern Anal Mach Intell, vol. 39, no. 12, pp. 2481–2495, Dec. 2017, doi: 10.1109/TPAMI.2016.2644615.
H. Noh, S. Hong, and B. Han, “Learning Deconvolution Network for Semantic Segmentation,” 2015.
L.-C. Chen, G. Papandreou, I. Kokkinos, K. Murphy, and A. L. Yuille, “DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs,” Jun. 2016, [Online]. Available: http://arxiv.org/abs/1606.00915
Z. Wang, W. Ren, and Q. Qiu, “LaneNet: Real-Time Lane Detection Networks for Autonomous Driving,” Jul. 2018, [Online]. Available: http://arxiv.org/abs/1807.01726
W. J. Yang, Y. T. Cheng, and P. C. Chung, “Improved Lane Detection with Multilevel Features in Branch Convolutional Neural Networks,” IEEE Access, vol. 7, pp. 173148–173156, 2019, doi: 10.1109/ACCESS.2019.2957053.
F. Yu, Y. Wu, Y. Suo, and Y. Su, “Shallow Detail and Semantic Segmentation Combined Bilateral Network Model for Lane Detection,” IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 8, pp. 8617–8627, Aug. 2023, doi: 10.1109/TITS.2023.3289165.
A. Paszke, A. Chaurasia, S. Kim, and E. Culurciello, “ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation.”
A. Al Mamun, P. P. Em, and J. Hossen, “Lane marking detection using simple encode decode deep learning technique: SegNet,” International Journal of Electrical and Computer Engineering, vol. 11, no. 4, pp. 3032–3039, Aug. 2021, doi: 10.11591/ijece.v11i4.pp3032-3039.
P.-R. Chen, S.-Y. Lo, H.-M. Hang, S.-W. Chan, and J.-J. Lin, “Efficient Road Lane Marking Detection with Deep Learning; Efficient Road Lane Marking Detection with Deep Learning,” 2018.
X. Yao, Y. Wang, Y. Wu, G. He, and S. Luo, “MLP-Based Efficient Convolutional Neural Network for Lane Detection,” IEEE Trans Veh Technol, vol. 72, no. 10, pp. 12602–12614, Oct. 2023, doi: 10.1109/TVT.2023.3275571.
S. Yoo et al., “End-to-End Lane Marker Detection via Row-wise Classification.”
Q. Zou, H. Jiang, Q. Dai, Y. Yue, L. Chen, and Q. Wang, “Robust Lane Detection from Continuous Driving Scenes Using Deep Neural Networks,” Mar. 2019, doi: 10.1109/TVT.2019.2949603.
A. Mukhopadhyay, L. R. D. Murthy, I. Mukherjee, and P. Biswas, “A Hybrid Lane Detection Model for Wild Road Conditions,” IEEE Transactions on Artificial Intelligence, vol. 4, no. 6, pp. 1592–1601, Dec. 2023, doi: 10.1109/TAI.2022.3212347.
S. Chougule, A. Ismail, A. Soni, N. Kozonek, V. Narayan, and M. Schulze, An efficient encoder-decoder CNN architecture for reliable multilane detection in real time; An efficient encoder-decoder CNN architecture for reliable multilane detection in real time. 2018. doi: 10.0/Linux-x86_64.
G. Pang, B. Zhang, Z. Teng, N. Ma, and J. Fan, “Fast-HBNet: Hybrid Branch Network for Fast Lane Detection,” IEEE Transactions on Intelligent Transportation Systems, 2022, doi: 10.1109/TITS.2022.3145018.
J. Fritsch, T. Kühnl, and A. Geiger, “A New Performance Measure and Evaluation Benchmark for Road Detection Algorithms.” [Online]. Available: http://www.cvlibs.net/datasets/kitti/
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 50sea

This work is licensed under a Creative Commons Attribution 4.0 International License.















