
Autonomous Solar Vehicle: A Community-Oriented Sustainable Transportation Solution Aligned with UN Sustainable Development Goals
DOI:
https://doi.org/10.33411/IJIST/1807Keywords:
Autonomous vehicle, Community Transportation, Solar Energy, YOLOv8, Sustainable Development Goals;Abstract
Introduction/Importance of Study: Urban transportation in developing countries presents persistent challenges, particularly for communities that rely on walking as their primary travel mode. Transport poverty affects millions of people and creates significant barriers to education, healthcare, and employment. In Pakistan, road-traffic accidents claim over 30,000 lives annually, of which approximately 67% are attributed to human error, while fossil-fuel dependency continues to exacerbate environmental degradation.
Novelty Statement: This research presents a novel community-oriented autonomous solar vehicle prototype integrating YOLOv8 Nano-based real-time detection with solar energy harvesting on a low-cost Raspberry Pi platform, providing safe, affordable, and sustainable last-mile transportation for universities, hospitals, and residential societies, directly contributing to UN SDGs 7, 11, and 13.
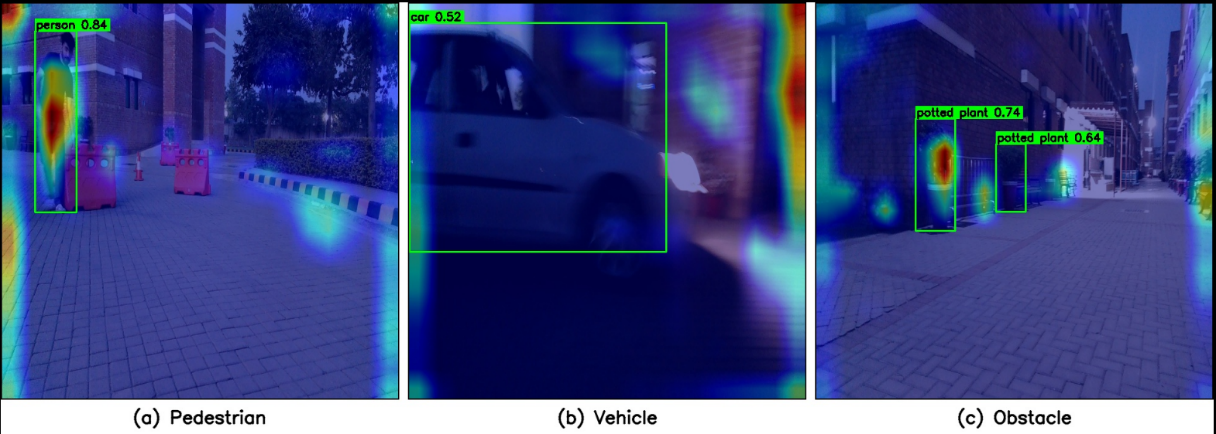
Materials and Methods: The prototype integrates a Raspberry Pi 4 Model B (4 GB) running ROS2 Foxy with YOLOv8 Nano (3.2 M parameters, 8.7 GFLOPs) for real-time pedestrian, vehicle, and obstacle detection. A custom dataset of 10,000+ campus-captured images was developed at Capital University of Science and Technology (CUST), Islamabad, and annotated using CVAT. Six ultrasonic sensors (four HC-SR04 and two waterproof JSN-SR04T) enable proximity detection over a 2–450 cm range, a NEO-6M GPS module provides waypoint navigation at 1 Hz, and a 50 W polycrystalline solar panel powers the 12 V system. The Pi is connected to a laptop external inference system through Wi-Fi or Ethernet over a TCP link on port 5555.
Results and Discussion: The model converged near epoch 85 of 100 (final box-loss ≈ 1.02, cls-loss ≈ 0.48, dfl-loss ≈ 1.18) and achieved an overall Detection Accuracy of 84.7% mAP@0.5 (per-class: pedestrian 87.3%, vehicle 84.1%, obstacle 82.6%) with 54.8% mAP@0.5:0.95. Inference speed was measured at 28 FPS on the companion laptop and 0.8 FPS on the Raspberry Pi 4, confirming the necessity of a two-tier compute architecture for real-time operation on low-cost edge hardware. The obstacle-avoidance subsystem achieved a 94% success rate across 50 controlled trials, with a total response time of 487 ± 42 ms (χ² = 3.18, p ≈ 0.037 versus an 85% baseline). Over a 14-day field test in Islamabad, the solar subsystem harvested 200 ± 15 Wh/day and avoided approximately 32 g CO₂/km relative to a grid-powered alternative, yielding a five-year per-vehicle cost advantage of approximately PKR 998k (≈ USD 3,560) over a fuel-powered equivalent.
Concluding Remarks: The prototype validates a cost-effective, community-focused transportation solution that addresses road safety through autonomous navigation while promoting environmental sustainability through solar energy integration, with particular relevance for educational campuses, healthcare facilities, and residential communities in developing regions.
References
Rose Luke, “Transport-related social exclusion and mobility in developing countries: the South African case,” Front. Sustain. Cities, vol. 6, 2024, doi: https://doi.org/10.3389/frsc.2024.1199055.
“Sustainable Development Report 2023.” Accessed: Mar. 17, 2026. [Online]. Available: https://sdgtransformationcenter.org/reports/sustainable-development-report-2023
Pranav Singh Chib, Pravendra Singh, “Recent Advancements in End-to-End Autonomous Driving using Deep Learning: A Survey,” arXiv:2307.04370, 2023, [Online]. Available: https://arxiv.org/abs/2307.04370
Umer Mansoor, Arshad Jamal, “Investigating the risk factors of motorcycle crash injury severity in Pakistan: Insights and policy recommendations,” Transp. Policy, vol. 139, pp. 21–38, 2023, doi: https://doi.org/10.1016/j.tranpol.2023.05.013.
“Global status report on road safety 2023.” Accessed: Mar. 17, 2026. [Online]. Available: https://www.who.int/teams/social-determinants-of-health/safety-and-mobility/global-status-report-on-road-safety-2023
“Pakistan - Countries & Regions - IEA.” Accessed: Apr. 28, 2026. [Online]. Available: https://www.iea.org/countries/pakistan
Muhammad Umair, Nabil M. Hidayat, “A renewable approach to electric vehicle charging through solar energy storage,” Plosone, vol. 19, no. 2, 2024, [Online]. Available: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0297376
Priyanshu Singla, Shakuntla Boora, Poonam Singhal, Nitin Mittal, Vikas Mittal & Fikreselam Gared, “Design and simulation of 4 kW solar power-based hybrid EV charging station,” Sci. Rep., vol. 14, 2024, [Online]. Available: https://www.nature.com/articles/s41598-024-56833-5
Juan Terven, Diana Margarita Córdova-Esparza, “A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS,” Mach. Learn. Knowl. Extr, vol. 5, no. 4, pp. 1680–1716, 2023, doi: https://doi.org/10.3390/make5040083.
Noor Ul Ain Tahir, Zhe Long, “PVswin-YOLOv8s: UAV-Based Pedestrian and Vehicle Detection for Traffic Management in Smart Cities Using Improved YOLOv8,” Drones, vol. 8, no. 3, p. 84, 2024, doi: https://doi.org/10.3390/drones8030084.
M. Sukkar, R. Jadeja, M. Shukla and R. Mahadeva, “A Survey of Deep Learning Approaches for Pedestrian Detection in Autonomous Systems,” IEEE Access, vol. 13, pp. 3994–4007, 2025, doi: 10.1109/ACCESS.2024.3524501.
RangeKing, “Model structure of YOLOv8 detection models(P5) - yolov8n/s/m/l/x,” ultralytics, 2023, [Online]. Available: https://github.com/ultralytics/ultralytics/issues/189#issue-1527158137, Accessed: May 14, 2025.
D. K. Alqahtani, M. A. Cheema, and A. N. Toosi, “Benchmarking Deep Learning Models for Object Detection on Edge Computing Devices,” Lect. Notes Comput. Sci. (including Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinformatics) , vol. 15404 LNCS, pp. 142–150, 2025, doi: 10.1007/978-981-96-0805-8_11/SAVE-RESEARCH.
P. Krishnan, S. Kattamuri, G. R. Prabhu, and M. Rashmi, “Assistive Eye: A Comparative Analysis of YOLO Object Detection Models on Edge Devices,” ACM Int. Conf. Proceeding Ser., pp. 104–108, Oct. 2024, doi: 10.1145/3675888.3676037;PAGE:STRING:ARTICLE/CHAPTER.
Abhishek Kumar Tripathi, G. Sree Lakshmi, Heena Mishra, Shravani Chapala, “Integration of Solar PV Panels in Electric Vehicle Charging Infrastructure: Benefits, Challenges, and Environmental Implications,” Energy Sci. Eng., 2025, [Online]. Available: https://scijournals.onlinelibrary.wiley.com/doi/full/10.1002/ese3.70014
M. S. Hossain, Laveet Kumar, M. M. Islam, Jeyraj Selvaraj, “A Comprehensive Review on the Integration of Electric Vehicles for Sustainable Development,” J. Adv. Transp., 2022, doi: https://doi.org/10.1155/2022/3868388.
Anis ur Rehman, Haris M. Khalid, “Grid-integrated solutions for sustainable EV charging: a comparative study of renewable energy and battery storage systems,” Front. Energy Res., vol. 12, no. 9, 2024, [Online]. Available: https://www.frontiersin.org/journals/energy-research/articles/10.3389/fenrg.2024.1403883/full
Diptakantha Gogoi, Anindya Bharatee, “Implementation of battery storage system in a solar PV-based EV charging station,” Electr. Power Syst. Res., vol. 229, p. 110113, 2024, doi: https://doi.org/10.1016/j.epsr.2024.110113.
Abhishek Kumar Kashyap & Kavya Konathalapalli, “Autonomous navigation of ROS2 based Turtlebot3 in static and dynamic environments using intelligent approach,” Int. J. Inf. Technol., 2025, [Online]. Available: https://link.springer.com/article/10.1007/s41870-025-02500-5
M. Hussain, “YOLOv1 to v8: Unveiling Each Variant–A Comprehensive Review of YOLO,” IEEE Access, vol. 12, 2024, doi: 10.1109/ACCESS.2024.3378568.
Zhengxia Zou, Keyan Chen, “Object Detection in 20 Years: A Survey,” Proc. IEEE, 2019, [Online]. Available: https://arxiv.org/abs/1905.05055
Muhammad Yeasir Arafat, Muhammad Morshed Alam, “Vision-Based Navigation Techniques for Unmanned Aerial Vehicles: Review and Challenges,” Drones, vol. 7, no. 9, p. 89, 2023, doi: https://doi.org/10.3390/drones7020089.
Ao Wang, Hui Chen, Lihao Liu, Kai Chen, Zijia Lin, Jungong Han, Guiguang Ding, “YOLOv10: Real-Time End-to-End Object Detection,” Adv. Neural Inf. Process. Syst., 2024, [Online]. Available: https://arxiv.org/abs/2405.14458
J. Wei, A. As’arry, K. Anas Md Rezali, M. Zuhri Mohamed Yusoff, H. Ma and K. Zhang, “A Review of YOLO Algorithm and Its Applications in Autonomous Driving Object Detection,” IEEE Access, vol. 13, pp. 93688–93711, 2025, doi: 10.1109/ACCESS.2025.3573376.
H. Kumar, P. Mamoria, and D. K. Dewangan, “Optimized Pedestrian Detection Leveraging YOLOv9: A Thorough Deep Learning Framework for Autonomous Vehicle System,” 2024 IEEE Int. Conf. Intell. Signal Process. Eff. Commun. Technol. Insp. 2024, 2024, doi: 10.1109/INSPECT63485.2024.10896195.
Ya Yuan, Wanli Dong, Sicong Yang & Tianya Wu, “AWD-YOLO enhancing autonomous driving perception reliability in adverse weather,” Sci. Rep., 2026, [Online]. Available: https://www.nature.com/articles/s41598-025-29575-1
T. T. Li et al., “Integrating solar-powered electric vehicles into sustainable energy systems,” Nat. Rev. Electr. Eng. 2025 27, vol. 2, no. 7, pp. 467–479, Jun. 2025, doi: 10.1038/s44287-025-00181-7.
Rahul Wilson Kotla, Nimmakanti Anil, Jayavani Lagudu, T. Dinesh & Bolla Kavya, “Techno economic integrated planning of solar integrated electric vehicle charging infrastructure in India using an AI enabled multi objective planning framework,” Sci. Rep., 2026, [Online]. Available: https://www.nature.com/articles/s41598-026-37080-2
Darshini Mahadevia, Chandrima Mukhopadhyay, “The role of urban transport in delivering Sustainable Development Goal 11: Learning from two Indian cities,” Heliyon, vol. 9, no. 9, p. e19453, 2023, doi: https://doi.org/10.1016/j.heliyon.2023.e19453.
J. Sachs, G. Schmidt-Traub, C. Kroll, G. Lafortune, G. Fuller, and F. Woelm, “Sustainable Development Report 2020: The Sustainable Development Goals and Covid-19 Includes the SDG Index and Dashboards,” Sustain. Dev. Rep. 2020, Jun. 2021, doi: 10.1017/9781108992411.
Saidou Sabi Boun, Ronaldo Janvier, “Environmental measures to improve pedestrian safety in low- and middle-income countries: a scoping review,” Glob. Health Promot., vol. 4, pp. 44–55, 2024.
Steve Macenski, Tom Moore, David Lu, Alexey Merzlyakov, Michael Ferguson, “From the Desks of ROS Maintainers: A Survey of Modern & Capable Mobile Robotics Algorithms in the Robot Operating System 2,” arXiv:2307.15236, 2023, [Online]. Available: https://arxiv.org/abs/2307.15236
Canicius Mwitta, Glen C. Rains, “The integration of GPS and visual navigation for autonomous navigation of an Ackerman steering mobile robot in cotton fields,” Front. Robot. AI, vol. 11, 2024, doi: https://doi.org/10.3389/frobt.2024.1359887.
T. Mahmud et al., “Design and Implementation of an Ultrasonic Sensor-Based Obstacle Avoidance System for Arduino Robots,” 2023 Int. Conf. Inf. Commun. Technol. Sustain. Dev. ICICT4SD 2023 - Proc., pp. 264–268, 2023, doi: 10.1109/ICICT4SD59951.2023.10303550.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 50sea

This work is licensed under a Creative Commons Attribution 4.0 International License.















