
Communication-Aware Autonomous Underwater Vehicle Framework with Multimodal Temporal Transformer for Integrated Perception, Routing, and Predictive Maintenance
DOI:
https://doi.org/10.33411/IJIST/1830Keywords:
Autonomous Underwater Vehicles (AUVs), Adaptive Routing, Predictive Maintenance, Artificial Intelligence (AI), Energy EfficiencyAbstract
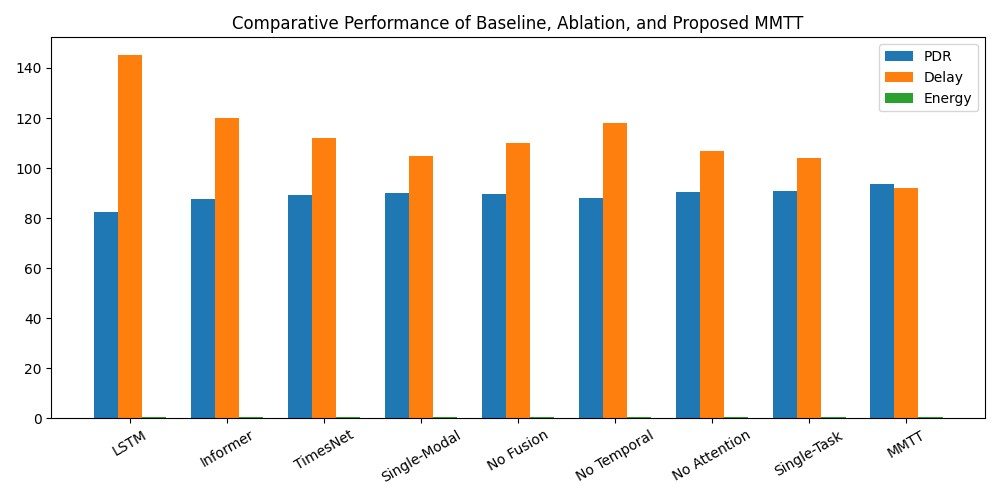
The growing applicability of Autonomous Underwater Vehicles (AUVs) in oceanographic studies, environmental monitoring, and infrastructure inspections, and infrastructure inspections is limited by the problem of underwater acoustic communication, which includes low bandwidth, high propagation delay, and high-power limitations. Current AUV networks are based on some form of static routing and reactive fault management, which are not suitable to large-scale, long-range underwater missions. This paper introduces a new communication-aware architecture for AUV networks which is based on a multimodal temporal transformer (MMTT)-based framework. In this framework, communication, routing and predictive maintenance are considered a multi-task sequential learning problem, to be optimized as a joint problem on a common temporal representation. It is based on a time-varying dynamic graph model, and it considers the mobility of nodes, environmental perturbations, and varying channel conditions. Evaluations of representative underwater scenarios through simulations show that our solution is improves packet delivery, energy savings, and route efficiency by factors of 20, 15, and 30, respectively than baseline protocols. Our framework is also able to reduce end-to-end latency by a quarter, ensuring timely data delivery in a dynamic underwater setting. These advances allow the proposed system to be more reliable and energy-efficient thereby supporting long-duration, scalable, and autonomous underwater missions.
References
Ian F. Akyildiz, Dario Pompili, “Underwater acoustic sensor networks: research challenges,” Ad Hoc Networks, vol. 3, no. 3, pp. 257–279, 2005, doi: https://doi.org/10.1016/j.adhoc.2005.01.004.
M. Aguiar, J. B. De Sousa, J. M. Dias, J. E. Da Silva, R. Mendes, and A. S. Ribeiro, “Optimizing autonomous underwater vehicle routes with the aid of high resolution ocean models,” Ocean. 2019 MTS/IEEE Seattle, Ocean. 2019, Oct. 2019, doi: 10.23919/OCEANS40490.2019.8962569.
S. Pedersen, J. Liniger, M. Von Benzon, F. F. Sorensen, and C. Mai, “Towards Autonomous Subsea Maintenance on Offshore Structures with Unmanned Underwater Vehicles,” Ocean. Conf. Rec., 2024, doi: 10.1109/OCEANS51537.2024.10682312.
Altaf Hussain, Shuaiyong Li, “Energy-Efficient and Trust-Based Autonomous Underwater Vehicle Scheme for 6G-Enabled Internet of Underwater Things,” Sensors, vol. 25, no. 1, p. 286, 2025, doi: https://doi.org/10.3390/s25010286.
Miguel Rodríguez Pérez, Sergio Herrería Alonso, “AI-Driven Adaptive Communications for Energy-Efficient Underwater Acoustic Sensor Networks,” Sensors, vol. 25, no. 12, p. 3729, 2025, doi: https://doi.org/10.3390/s25123729.
Z. Xiao et al., “Reliability Evaluation for WSNs Based on Deep Reinforcement Learning and Graph Neural Networks,” IEEE Trans. Mob. Comput., vol. 25, no. 1, pp. 861–877, 2026, doi: 10.1109/TMC.2025.3595199.
S. Zhang, H. Chen, and L. Xie, “GNN-IR: An Intelligent Routing Method Based on Graph Neural Network in the Underwater Acoustic Sensor Network,” IEEE Sens. J., vol. 24, no. 13, pp. 21566–21582, Jul. 2024, doi: 10.1109/JSEN.2024.3398375.
A. Khan, N. Javaid, A. Sher, R. A. Abbasi, Z. Ahmad, and W. Ahmed, “Load balancing and collision avoidance using opportunistic routing in wireless sensor networks,” Proc. - Int. Conf. Adv. Inf. Netw. Appl. AINA, vol. 2018-May, pp. 236–243, Aug. 2018, doi: 10.1109/AINA.2018.00045.
X. Zhu, G. Lu, Y. Luo, Y. Dong, Y. Chen, and Y. Tao, “A Secure Routing Protocol Based on Graph Neural Networks for Underwater Acoustic Sensor Networks,” Proc. 2023 IEEE Int. Conf. Signal Process. Commun. Comput. ICSPCC 2023, 2023, doi: 10.1109/ICSPCC59353.2023.10400376.
Hongling Chu, Biao Wang, “Adaptive Power-Controlled Energy-Efficient Depth-Based Routing Protocol for Underwater Wireless Sensor Networks,” J. Mar. Sci. Eng., vol. 13, no. 8, p. 1418, 2025, doi: https://doi.org/10.3390/jmse13081418.
A. Roy, S. Roy, and S. K. Metya, “Dynamic cluster head routing protocol for intra and inter- cluster underwater acoustic wireless sensor networks,” Wirel. Networks 2026, pp. 1–21, Mar. 2026, doi: 10.1007/S11276-026-04119-1.
Yufang Li, Liliang Zhang, “Underwater acoustic intelligent spectrum sensing with multimodal data fusion: An Mul-YOLO approach,” Futur. Gener. Comput. Syst., vol. 173, p. 107880, 2025, doi: https://doi.org/10.1016/j.future.2025.107880.
Sihem Souiki, Mourad Hadjila, “Fuzzy Based Clustering and Energy Efficient Routing for Underwater Wireless Sensor Networks,” Int. J. Comput. Networks Commun., vol. 7, no. 2, pp. 33–44, 2015, doi: 10.5121/ijcnc.2015.7203.
Rehenuma Tasnim Rodoshi, Yujae Song, Wooyeol Choi, “Reinforcement Learning-Based Routing Protocol for Underwater Wireless Sensor Networks: A Comparative Survey,” IEEE Access, 2021, [Online]. Available: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9615209
B. Jiang, J. Feng, X. Cui, F. Luo, H. Helen Wang, and H. Herbert Song, “GCN-LG-Trust Model for Attack Detection and Cluster Optimization in Underwater Wireless Sensor Networks,” IEEE Sens. J., vol. 25, no. 13, pp. 25503–25514, 2025, doi: 10.1109/JSEN.2025.3570812.
L. Wenhao, H. Qiming, C. Yufei, Z. Meiling, and L. Rong, “Advanced Routing Protocols for Underwater Wireless Sensor Networks: Energy Optimization and Quality of Service Enhancement,” Aug. 2025, doi: 10.20944/PREPRINTS202508.0998.V1.
B. Jiang, R. Zhou, F. Luo, X. Cui, Y. Liu, and H. Song, “Hybrid Trust Model for Identifying Malicious Attacks in Underwater Acoustic Sensor Network,” IEEE Sens. J., vol. 24, no. 16, pp. 26743–26754, 2024, doi: 10.1109/JSEN.2024.3424252.
Lin Sun, Xiaohong Shen, “Multi-dimensional dynamic trust routing for multi-attack underwater acoustic sensor networks,” Ocean Eng., vol. 348, p. 124025, 2026, doi: https://doi.org/10.1016/j.oceaneng.2025.124025.
N. Javaid, Z. Ahmad, A. Sher, Z. Wadud, Z. A. Khan, and S. H. Ahmed, “Fair energy management with void hole avoidance in intelligent heterogeneous underwater WSNs,” J. Ambient Intell. Humaniz. Comput. 2018 1011, vol. 10, no. 11, pp. 4225–4241, Mar. 2018, doi: 10.1007/S12652-018-0765-8.
Z. U. Rahman et al., “On utilizing static courier nodes to achieve energy efficiency with depth based routing for underwater wireless sensor networks,” Proc. - Int. Conf. Adv. Inf. Netw. Appl. AINA, vol. 2016-May, pp. 1184–1191, May 2016, doi: 10.1109/AINA.2016.170.
Naveed Ilyas, Zaheer Ahmad, Boreom Lee & Kiseon Kim, “An effective modular approach for crowd counting in an image using convolutional neural networks,” Sci. Rep., 2022, [Online]. Available: https://www.nature.com/articles/s41598-022-09685-w
M. I. Adnan Karamat, “A Hybrid Transformer Architecture for Multiclass Mental Illness Prediction Using Social Media Text,” IEEE Access, 2025, [Online]. Available: https://ieeexplore.ieee.org/document/10804794
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 50sea

This work is licensed under a Creative Commons Attribution 4.0 International License.















