
Automated Objects Delivery System for Interior Locale using Line Following Robot with Optimized Security Parameters
Keywords:
Internet of Things, Line following robots, Hybrid Security, Indoor delivery robots, Real-time image trackingAbstract
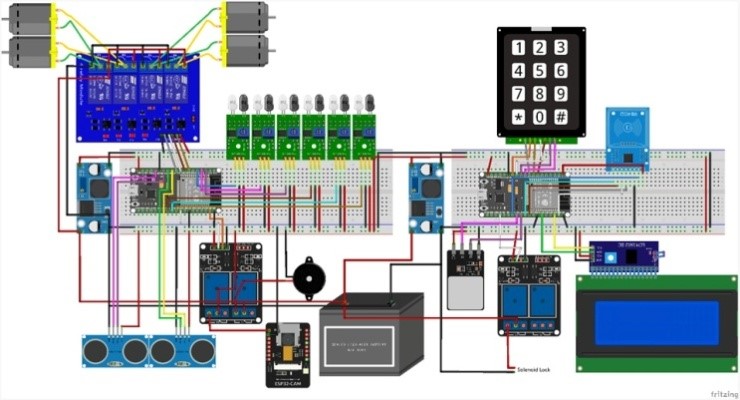
Automated object delivery robots are increasingly sought for convenience, reliability, efficiency, supporting organizational productivity, elderly assistance, and reducing human error and labor costs in indoor delivery tasks. While various security measures have been implemented for the delivery robot’s safety, the design strategies used in existing studies do not suffice as they do not use biometric technology for unlocking the robot and real-time image tracking of robot thievery via mobile app. This research-based project aims to design and develop an object delivery system within small to medium-scale buildings using a robotic prototype controlled via an Android app. The robot navigates using a line-following technique with IR sensors, avoids static obstacles with an ultrasonic sensor, verifies the receiver with a fingerprint scanner, detects the destinations using an RFID module, and captures images of illicit attempts using an ESP32 camera module sending them in the app simultaneously. The designed prototype along with the Android app has undergone several feature tests with varying conditions. The results suggest that the system can securely carry a payload weighing 20 kg and is capable of navigating 10 km with a speed of 5 m/s depending upon the battery power. This project plans to tackle significant Sustainable Development Goals (SDGs) specifically, achieve Quality Education through SDG 4, Decent Work and Economic Growth in SDG 8, and Industry, Innovation, and Infrastructure in SDG 9.
References
K. Azadeh, M. B. M. de Koster, and D. Roy, “Robotized and Automated Warehouse Systems: Review and Recent Developments,” SSRN Electron. J., May 2017, doi: 10.2139/SSRN.2977779.
J. Minard, “Week 8 Research Article: Implementation of Robotic Automation in Foodservice,” Hosp. Grad. Student Scholarsh., Jan. 2022, Accessed: Jan. 08, 2025. [Online]. Available: https://scholarsarchive.jwu.edu/hosp_graduate/30
“Efficient and Sustainable Last-Mile Logistics: Lessons from Japan In collaboration with McKinsey and Company B R I E F I N G P A P E R A P R I L 2 0 2 1”.
“‘Amazon Robotic Service (ARS)’ by Patil Girija, John Mareena et al.” Accessed: Jan. 08, 2025. [Online]. Available: https://pdxscholar.library.pdx.edu/etm_studentprojects/2309/
A. H. Chiang and S. Trimi, “Impacts of service robots on service quality,” Serv. Bus., vol. 14, no. 3, pp. 439–459, Sep. 2020, doi: 10.1007/S11628-020-00423-8/FIGURES/4.
M. R. Summerfield, F. J. Seagull, N. Vaidya, and Y. Xiao, “Use of pharmacy delivery robots in intensive care units,” Am. J. Health. Syst. Pharm., vol. 68, no. 1, pp. 77–83, Jan. 2011, doi: 10.2146/AJHP100012.
S. Kavirayani, D. S. Uddandapu, A. Papasani, and T. V. Krishna, “Robot for Delivery of Medicines to Patients Using Artificial Intelligence in Health Care,” Proc. B-HTC 2020 - 1st IEEE Bangalore Humanit. Technol. Conf., Oct. 2020, doi: 10.1109/B-HTC50970.2020.9297948.
R. K. W. Vithanage, C. S. Harrison, and A. K. M. Desilva, “Importance and Applications of Robotic and Autonomous Systems (RAS) in Railway Maintenance Sector: A Review,” Comput. 2019, Vol. 8, Page 56, vol. 8, no. 3, p. 56, Jul. 2019, doi: 10.3390/COMPUTERS8030056.
A. Pani, S. Mishra, M. Golias, and M. Figliozzi, “Evaluating public acceptance of autonomous delivery robots during COVID-19 pandemic,” Transp. Res. Part D Transp. Environ., vol. 89, p. 102600, Dec. 2020, doi: 10.1016/J.TRD.2020.102600.
and F. J. L. B. Paula da Cruz, A. Horácio Couto Bittencourt, M. Maria Freitas Neto, N. Sérgio Peres Stahl, “Students’ perceptions about a multimedia learning laboratory: An experience in teaching biology classes,” RENOTE, vol. 15, no. 1, 2017.
P. Y. L. and N. S. Ahmad, “Exploring Autonomous Load-Carrying Mobile Robots in Indoor Settings: A Comprehensive Review,” IEEE Access, pp. 1–1, 2024.
and M. N. Muniyandy Elangovan, M. Yousuf, M. Nauman, “Design and Development of Delivery Robot for Commercial Purpose,” Int. Res. J. Adv. Sci. Hub, vol. 47, pp. 192–197, 202AD.
T. M. and H. S. J. Zhang, G. Song, G. Qiao, “An indoor security system with a jumping robot as the surveillance terminal,” IEEE Trans. Consum. Electron., vol. 57, no. 4, pp. 1774–1781, 2011.
P. G. and Y. C. W. Wang, “An AI-Driven Secure and Intelligent Robotic Delivery System,” IEEE Trans. Eng. Manag., vol. 71, pp. 12658–12673, 2024.
and S. G. Chaudhari, A. Desai, “Line following robot using arduino for hospitals,” 2nd Int. Conf. Intell. Commun. Comput. Tech., pp. 330–332, 2019.
S. Kamon and S. Thongkom, “Controlling the Line Follower Delivery Robot with MIT APP Inventor,” J. Technol. Innov. Tert. Educ., vol. 1, no. 1, pp. 9–16, 2018.
and W. K. I. L. W. S. I. A. P. Diddeniya, A. M. S. B. Adikari, H. N. Gunasinghe, P. R. S. de Silva, N. C. Ganegoda, “Vision Based Office Assistant 109 Robot System for Indoor Office Environment; Vision Based Office Assistant Robot System for Indoor Office Environment,” 2018.
and A. N. W. J. W. Lok, W. M. W. Muda, “Development of Warehouse Robot with Advanced Line Following and Background Color Sensors,” JAMT.
S. Kavirayani, D. S. Uddandapu, A. Papasani, and T. V. Krishna, “Robot for Delivery of Medicines to Patients Using Artificial Intelligence in Health Care,” B-HTC 2020 - 1st IEEE Bangalore Humanit. Technol. Conf., 2020.
C.-Y. Siao, J.-W. Lin, and R.-G. Chang, “The Design and Implementation of A Delivery System,” IEEE Eurasia Conf. IOT, Commun. Eng., 2020.
M. Memon, M. M., Jawaid, M. M., Narejo, S., & Rathi, “Computer-Assisted Framework for Automatic Detection of Structural Hand Deformities,” J. Hunan Univ. Nat. Sci., vol. 48, no. 10, 2021, Accessed: May 22, 2024. [Online]. Available: http://jonuns.com/index.php/journal/article/view/826
M. Memon, B. Lalwani, M. Rathi, Y. Memon, and K. Fatima, “A Framework for Automatic Blood Group Identification and Notification Alert System,” Sir Syed Univ. Res. J. Eng. Technol., vol. 13, no. 2, pp. 74–84, Dec. 2023, doi: 10.33317/SSURJ.578.
and N. Q. S. Irfan Ali Bhacho, Hina Lilaram, Sarmad Talpur, M. Memon, “Real Time Detection of Diabetic Retinopathy using Deep Learning Techniques,” IJIST, vol. 6, no. 4, pp. 1848–1861, 2024.
I. Ashraf, Adnan & Kumar, Anroop & Memon, Madeha & Jr, “A Sustainable Growth Meta Mask Consulting Application for Agriculture Sector Using Ethereum and Blockchain Technology.,” 2024.
and M. O. T. H. SUPRIYONO, P. A. N. ROCHMAN, “IoT Technology Involving Wheeled Line Follower Robot for Restaurant Services Automation,” ELKOMIKA J. Tek. Energi Elektr. Tek. Telekomun. Tek..
and J. P. E. Rubies, Ricard Bitriá, “A Parcel Transportation and Delivery Mechanism for an Indoor Omnidirectional Robot,” Appl. Sci., vol. 14, no. 17, pp. 7987–7987, 2024.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 50SEA

This work is licensed under a Creative Commons Attribution 4.0 International License.















